CLI Tools
CLI Tools
ROS install
我安装的是 ROS2 Iron Irwini 版本,推荐使用 Debian packages 安装,消耗大约 2GB 空间,以下是官方教程
Configure Environment
每次打开终端运行 ROS2 时都要获取一次配置文件:
source /opt/ros/iron/setup.bash但如果不想每次进入都运行这条语句,可以将其写入终端启动脚本:
echo "source /opt/ros/iron/setup.bash" >> ~/.bashrcTurtlesim, ros2, rqt
Installation
sudo apt update
sudo apt install ros-iron-turtlesim
sudo apt install '~nros-iron-rqt*'Run Turtlesim
开启一个终端:
ros2 run turtlesim turtlesim_node该语句用于生成一个小乌龟~
再开启一个终端:
ros2 run turtlesim turtle_teleop_key该终端用于遥控小乌龟,在 QWERTY 配置的键盘上,利用 F 键周围一圈的字母控制小乌龟朝向,利用上下左右方向键移动小乌龟
重映射(多 turtle 的控制)
利用 rqt GUI 的/spawn service 产生新的节点——turtle2
ros2 run turtlesim turtle_teleop_key --ros-args --remap turtle1/cmd_vel:=turtle2/cmd_vel再在新建的终端上重新映射 turtle1/cmd_vel topic,由此可以将遥控控制权交给 turtle2
Nodes
ros2 node list # 查看节点列表生成 turtle 并打开遥控台后,会产生两个节点,利用ros2 node list命令查看节点,输出结果为:
/turtlesim # turtle
/teleop_turtle # 遥控台teleop 是 teleopration 的简称
node info
ros2 node info <node_name> # 用于查看节点信息我们查看/turtlesim和/teleop_turtle节点信息,输出如下:
/turtlesim/turtlesim
Subscribers:
/parameter_events: rcl_interfaces/msg/ParameterEvent
/turtle1/cmd_vel: geometry_msgs/msg/Twist
Publishers:
/parameter_events: rcl_interfaces/msg/ParameterEvent
/rosout: rcl_interfaces/msg/Log
/turtle1/color_sensor: turtlesim/msg/Color
/turtle1/pose: turtlesim/msg/Pose
Service Servers:
/clear: std_srvs/srv/Empty
/kill: turtlesim/srv/Kill
/reset: std_srvs/srv/Empty
/spawn: turtlesim/srv/Spawn
/turtle1/set_pen: turtlesim/srv/SetPen
/turtle1/teleport_absolute: turtlesim/srv/TeleportAbsolute
/turtle1/teleport_relative: turtlesim/srv/TeleportRelative
/turtlesim/describe_parameters: rcl_interfaces/srv/DescribeParameters
/turtlesim/get_parameter_types: rcl_interfaces/srv/GetParameterTypes
/turtlesim/get_parameters: rcl_interfaces/srv/GetParameters
/turtlesim/get_type_description: type_description_interfaces/srv/GetTypeDescription
/turtlesim/list_parameters: rcl_interfaces/srv/ListParameters
/turtlesim/set_parameters: rcl_interfaces/srv/SetParameters
/turtlesim/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically
Service Clients:
Action Servers:
/turtle1/rotate_absolute: turtlesim/action/RotateAbsolute
Action Clients:/teleop_turtle/teleop_turtle
Subscribers:
/parameter_events: rcl_interfaces/msg/ParameterEvent
Publishers:
/parameter_events: rcl_interfaces/msg/ParameterEvent
/rosout: rcl_interfaces/msg/Log
/turtle1/cmd_vel: geometry_msgs/msg/Twist
Service Servers:
/teleop_turtle/describe_parameters: rcl_interfaces/srv/DescribeParameters
/teleop_turtle/get_parameter_types: rcl_interfaces/srv/GetParameterTypes
/teleop_turtle/get_parameters: rcl_interfaces/srv/GetParameters
/teleop_turtle/get_type_description: type_description_interfaces/srv/GetTypeDescription
/teleop_turtle/list_parameters: rcl_interfaces/srv/ListParameters
/teleop_turtle/set_parameters: rcl_interfaces/srv/SetParameters
/teleop_turtle/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically
Service Clients:
Action Servers:
Action Clients:
/turtle1/rotate_absolute: turtlesim/action/RotateAbsoluteTopics
节点可以将数据发布到任意数量的 topics,并同时订阅任意数量的 topics。Topic 是数据在节点之间移动的主要方式之一,因此也是在系统的不同部分之间移动数据的主要方式之一。

rqt_graph 可视化 topic 框图
rqt_graph启动 rqt_graph 工具
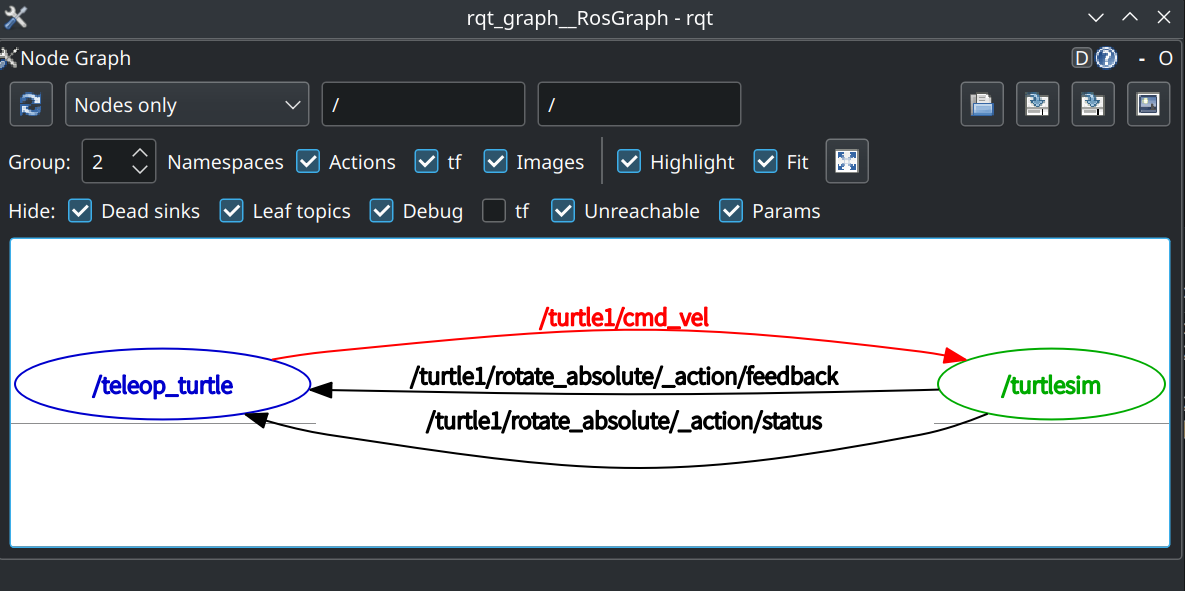
该图展示了/turtlesim节点和/teleop_turtle节点如何利用 topic 互相通信,节点 /teleop_turtle 正在向 /turtle1/cmd_vel topic 发送数据,并且 /turtlesim节点订阅了该 topic 以接收数据
topic list
ros2 topic list # 展示所有 topic 列表
ros2 topic list -t # 返回相同的列表,但是展示 topic 类型/parameter_events [rcl_interfaces/msg/ParameterEvent]
/rosout [rcl_interfaces/msg/Log]
/turtle1/cmd_vel [geometry_msgs/msg/Twist]
/turtle1/color_sensor [turtlesim/msg/Color]
/turtle1/pose [turtlesim/msg/Pose]topic echo(监听 topic)
ros2 topic echo <topic_name>如果我们新开启一个终端,输入ros2 topic echo /turtle1/cmd_vel,起初并不会有数据返回,但是当开始利用遥控台移动小乌龟时,echo命令就会返回/cmd_vel运送的数据,是用户发出的指令,也是小乌龟的线速度和角速度。
topic info
ros2 topic info <topic_name> # 返回节点信息ros2 interface show && ros2 topic pub
ros2 interface show geometry_msgs/msg/Twist # 通过该命令显示某类型 topic / service / action 的数据结构
# 这里就在要求显示/turtle1/cmd_vel作为geometry_msgs/msg/Twist类型的数据结构返回值:
# This expresses velocity in free space broken into its linear and angular parts.
Vector3 linear
float64 x
float64 y
float64 z
Vector3 angular
float64 x
float64 y
float64 z如果要用命令行赋值给/turtle1/cmd_vel topic,则需要利用以下命令:
ros2 topic pub <topic_name> <msg_type> '<args>'其中
<args>为 YAML 格式
输入:
ros2 topic pub --once /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"即可控制小乌龟画一个圆(角速度恒定 + 线速度恒定)
topic pub 选项列表:
--once发布一条消息就退出(执行一次就退出)--rate <num>指定以怎样的频率发布消息(执行命令)
ros2 topic hz
ros2 topic hz /turtle1/pose # 查看数据发布速率返回:
average rate: 59.354
min: 0.005s max: 0.027s std dev: 0.00284s window: 58Services
service 基于 request-response 模型,而不是主题的发布者 - 订阅者模型。虽然 topic 允许节点订阅数据流并获得持续更新,但 service 仅在客户端专门调用时提供数据。

service list
ros2 service list [-t] # 查看已有服务数量 -t 选项负责显示服务类型服务类型也可以通过service type命令得到
ros2 service type <service_name>service find
ros2 service find <type_name> # 查找所有特定类型的服务interface show
service 依旧可以支持接口显示
ros2 interface show <type_name>服务类型的接口返回数据会带有一个---,其上方结构表示 request 结构,下方表示 response 结构,例如:
ros2 interface show turtlesim/srv/Spawn输出:
float32 x
float32 y
float32 theta
string name # Optional. A unique name will be created and returned if this is empty
---
string nameservice call
可以使用以下命令调用服务:
ros2 service call <service_name> <service_type> <arguments>其中参数支持 YAML 语法
service echo(service 监听)
要查看服务客户端和服务服务器之间的数据通信,可以使用以下命令来访问服务
ros2 service echo <service_name | service_type> <arguments>但是 service echo 默认情况下是禁用的,若要启用他,用户必须在创建服务器客户端或服务器后进行调用 configure_introspection.
按照下方命令启动configure_introspection
ros2 launch demo_nodes_cpp introspect_services_launch.py打开另一个终端并运行以下命令以启用introspection_client 和 introspection_service
ros2 param set /introspection_service service_configure_introspection contents
ros2 param set /introspection_client client_configure_introspection contents这样才可以监听服务:
服务监听
ros2 service echo --flow-style /add_two_ints
info:
event_type: REQUEST_SENT
stamp:
sec: 1709408301
nanosec: 423227292
client_gid: [1, 15, 0, 18, 250, 205, 12, 100, 0, 0, 0, 0, 0, 0, 21, 3]
sequence_number: 618
request: [{a: 2, b: 3}]
response: []
---
info:
event_type: REQUEST_RECEIVED
stamp:
sec: 1709408301
nanosec: 423601471
client_gid: [1, 15, 0, 18, 250, 205, 12, 100, 0, 0, 0, 0, 0, 0, 20, 4]
sequence_number: 618
request: [{a: 2, b: 3}]
response: []
---
info:
event_type: RESPONSE_SENT
stamp:
sec: 1709408301
nanosec: 423900744
client_gid: [1, 15, 0, 18, 250, 205, 12, 100, 0, 0, 0, 0, 0, 0, 20, 4]
sequence_number: 618
request: []
response: [{sum: 5}]
---
info:
event_type: RESPONSE_RECEIVED
stamp:
sec: 1709408301
nanosec: 424153133
client_gid: [1, 15, 0, 18, 250, 205, 12, 100, 0, 0, 0, 0, 0, 0, 21, 3]
sequence_number: 618
request: []
response: [{sum: 5}]
---Actions
Action 是 ROS 2 中的通信类型之一,用于长时间运行的任务。它们由三个部分组成:goal、feedback 和 result。action 基于 topic 和 service 构建。它们的功能类似于 service,只是可以取消 action。它们还提供稳定的 feedback,而不是返回单一响应的 service。
Action 使用 client - server 模型,类似于 publisher - Subscriber 模型(在 topic 教程中介绍)。“action-client”节点将目标发送到“action-server”节点,该节点确认目标并返回反馈流和结果。

Use Action
当我们打开遥控台时,我们在终端上看到的“利用 G|B|V|C|D|E|R|T 来旋转小乌龟”就是一个 action(第一个指令对应 /cmd_vel topic)
About client and server
动作的客户端和服务器在节点信息的最后两行中有所体现,点击返回至节点信息小节,对比/turtlesim和teleop_turtle节点信息中 action 的差别
action operation
ros2 action list [-t] # 获取 action 列表,[-t] 选项支持显示 action 类型
ros2 action info <action_name> # 获取 action 信息,返回客户端与服务端的个数与 action 类型
ros2 interface show <action_type>
# 返回 action 类型,两条---将返回值分为三个部分,从上到下依次是 goal, result, feedback的结构
ros2 action send_goal <action_name> <action_type> <values> # 发送 action 语句,<values>支持 YAML 格式
ros2 action send_goal <action_name> <action_type> <values> --feedback
# 若要查看目标 action 的反馈,请在最后加入 --feedback 参数Paraments
ros2 param list # 获取参数列表
ros2 param get <node_name> <parameter_name> # 获取参数类型和当前值
ros2 param set <node_name> <parameter_name> <value> # 设置并改变参数当前值
ros2 param dump <node_name> # 以 YAML 语法输出参数信息,支持重定向至 .yaml 文件以便于保存参数
ros2 param dump /turtlesim > turtlesim.yaml # 保存参数并重定向
ros2 param load <node_name> <parameter_file> # 加载参数文件至某一节点
ros2 run <package_name> <executable_name> --ros-args --params-file <file_name> # 可以在启动节点时就加载参数列表launch Nodes
当构建更为复杂系统的时候,一个个打开终端太麻烦了,因此可以通过 launch files 来自动配置一系列节点。运行单独的 launch files 命令为ros2 launch ,这将启动你的整个系统。
打开一个新终端并运行:
ros2 launch turtlesim multisim.launch.py这条命令将会运行以下程序:
from launch import LaunchDescription
import launch_ros.actions
def generate_launch_description():
return LaunchDescription([
launch_ros.actions.Node(
namespace = "turtlesim1", package = "turtlesim", executable = "turtlesim_node", output = "screen"
),
launch_ros.actions.Node(
namespace = "turtlesim2", package = "turtlesim", executable = "turtlesim_node", output = "screen"
),
])这将会在屏幕上启动两个 turtlesim 节点。